Our Robot
Ultimate Goal 2020-2021 Season
This years robot uses a Mecanum drivetrain to enable it to do precise movementes and move at a fast speed.
Key Features:
- Our robot uses a 4 wheel mecanum drivetrain, which improves mobility and makes it much easier to aim the robot.
- The all in one Shooter + Intake designed for this season enables us to quickly pick up rings, as well as shoot them accuratly. This increases the maximum scoring potential while also allowing us use innovative gameplay strategies.
- The Autonomous routine uses distance sensors to determine the location of the robot during autonomous.
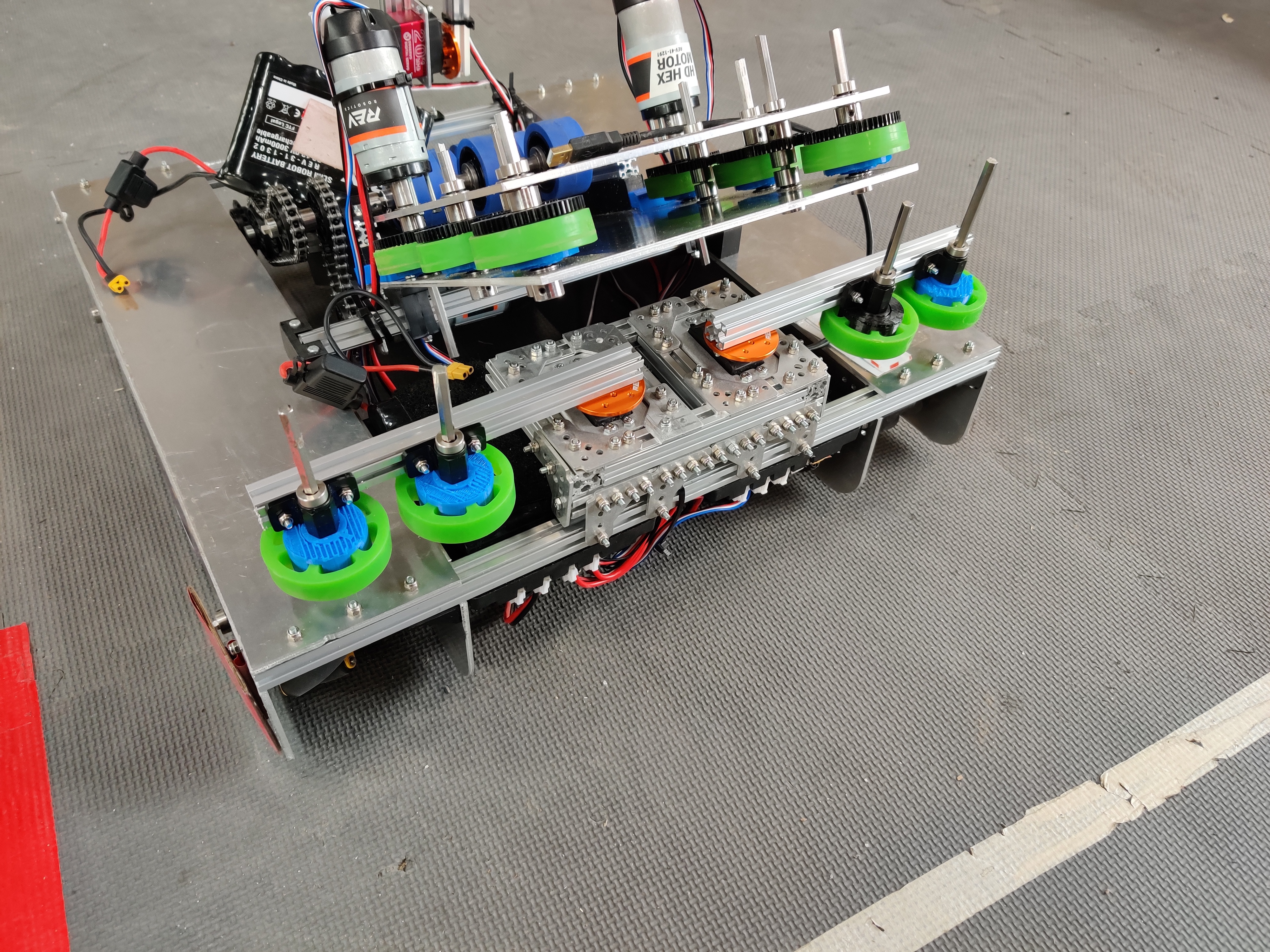
Skystone 2019-2020 Season
This year, we used a welded aluminum chasis and a unique swerve drive to quickly move around the field.
Key Features:
- We used a swerve drivetrain this year. This gives us the maneuverability of a mecanum drive and the speed of a tank drive.
- The welded aluminum chasis is strong, light, and custom designed to fit all of the modules we need.
- Our lift could extend fully in less than 2 seconds, which could easily extend before we got to the foundation.
Rover Ruckus 2018- 2019 Robot
Team Eclipse's 2018-2019 is finally here! It features a new and innovative design which allows it to quicly score minerals in the lander using a large robotic arm. This design proves to not only be efficient but also allows for the robot to play in new ways never before seen.
Key Features:
- Our robot uses a 10 wheel drivetrain which allows for fast field navigation, precise turning, and massive amounts of traction in both TeleOp and Autonomous.
- The four stage robotic arm developed for this season allows for rapid mineral collection and deposition in the lander. This increases the robot's maximum scoring potential while also allowing for new innovative ways of gameplay.
- The Autonomous routine uses a special TensorFlow code object for quick, interference free mineral detection and sifting.
- Our lead screw lift mechanism allows us to deploy in Autonomus and hang in endgame while ensuring that the robot is hung from it's center of gravity.

In the Picture is Gabe (A Team Eclipse alumni) who was a previous team leader
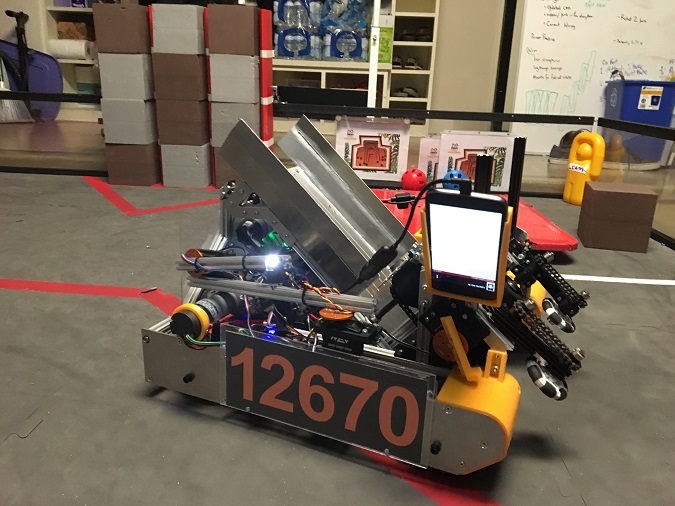
Relic Recovery 2017- 2018 Robot
A simple design also leads to an elegant appearance of the robot. This can be seen in the shape of the robot. Because the robot was designed to have the path of the glyphs to simply run straight into the Slam Dunk, it resulted in our robot having an efficient scoring mechanism which lends to its grace during matches.
Key features:
- Our slim Mecanum drivetrain allows us to easily collect glyphs and line up with the cryptobox in both autonomous and teleop.
- The Slam Dunk is able to fit two glyphs at a time, halving that amount of time spent collecting and scoring glyphs because you need to only collect glyphs once for two glyphs as opposed to having to go back and forth twice.
- Our high-tolerance fold-out intake allows for the drive team to pick up glyphs at 45 degree angle.
- Our relic arm mechanism is a cascade lift that uses 2 servos to control the claw. The arm extends with 1 motor and is very lightweight.
- The two wegdes on the front of the robot allows us to be able get onto the balancing stone in under 8 seconds on average.